Impact rétroaction (BO->BF) pour 1er ordre
1er ordre boucle ouverte BO :
- Entrée du procédé : e(t)
- Sortie : s(t)
- Fonction de transfert BO :
H_0(p) = S(p)/E(p) = K_0 / (1 + tau_0*p) - en temporel : s(t) = E0 * K_f * (1 – exp(-t/tau_f))
K_0 : gain statique du procédé (BO)K_0 = s(∞)/e(∞)
BF: Évolution du gain et de la constante de temps
H_f(p) = S(p)/E*(p) = H_0(p) / (1 + H_0(p))
H_f(p) = (K_0/(1+tau_0*p)) / (1 + K_0/(1+tau_0*p))H_f(p) = K_0 / (tau_0*p + 1 + K_0)
H_f(p) = K_f / (1 + tau_f*p) avec
pôle : p_f = -1/tau_f = -(1+K_0)/tau_0)
tau_f = tau_0/(1+K_0)
K_f = K_0/(1+K_0) même résultat pour 2nd ordre!
et ksi_f= ksi_0/(sqrt(1+K_0)) < ksi_0
w0_f=w0 * sqrt(1+K_0) > w0
2ème ordre: ksi diminue et w0 augmente,
attention aux oscillations et instabilité!!
Réponse échelon -> Erreur statique eps_inf (erreur en régime permanent) :
eps_inf = e*(∞) - s(∞)- eps(t) = e*(t) – s(t) écart résiduel entre la consigne e* et la sortie s quand le régime transitoire est terminé.
- BO Laplace definition de l’erreur :S(p) = H_0(p) * EPS(p)
- avec R
étroactionle comparateur (+//-) donne : EPS(p)=E*(p)-S(p) - la sortie dépend de l’erreur qui dépend elle même de la sortie : fctmnt de la boucle
- ces relations combinées nous donne !! après injection de EPS(p) dans S(p)
- S(p) = H_0(p) · EPS(p) ⇒ EPS(p) = E*(p) − S(p) ⇒ S(p) / E*(p) = H_0(p) / (1 + H_0(p)) = H_f(p)
⇒ EPS(p) / E*(p) = 1 − S(p)/E*(p) = 1 / (1 + H_0(p)) ⇒ EPS(p) = E*(p) / (1 + H_0(p)) - ➝ EPS(p) / E*(p) = 1 / (1 + H_0(p)) (indique quelle part de la consigne n’est pas suivie)
- th val finale:
eps_inf = lim_{p->0} p*EPS(p) (hyp:pôles de la BF à partie réelle négative) - relations combinées → après transformation :
➝EPS(p) = E*(p)/(1 + H_0(p)) quand p -> 0
en BF et pour une consigne échelone*(t)=E0*u(t): E*(p)=E0/p - résultat BF: eps_inf =
p*EPS(p)* E0/p = p*E0/p* / (1 + H_0) = E0/(1+K_0) - robustesse vis-à-vis des incertitudes paramétriques (qd gain varie..)
- on avait en BO: eps_inf_BO = E0*(1 – K_0)
- très sensible avec variation du gain K_0 , linéaire, explose vite,pas robuste
- !! régler K_0=1 pas vraiment possible car le gain varie (température, vieillissement)
-> Réponse indicielle: l’erreur statique dépend slt du gain statique de boucle ouverte K_0.
La rétroaction ne change pas la nature physique du procédé, elle agit comme un diviseur d’erreur : Plus K_0 est grand, plus l’erreur résiduelle est faible. La constante de temps tau_0 n’intervient pas : elle influence la vitesse de réponse, pas la précision finale.
Compromis classique précision–robustesse : augmenter K_0 améliore la précision statique, mais au prix de contraintes accrues sur la stabilité et la sensibilité au bruit.
La rétroaction ne sert pas d’abord à aller plus vite, mais à être juste malgré les incertitudes.
La rétroaction améliore la précision et la robustesse du système, mais seule l’action intégrale permet d’annuler l’erreur statique.
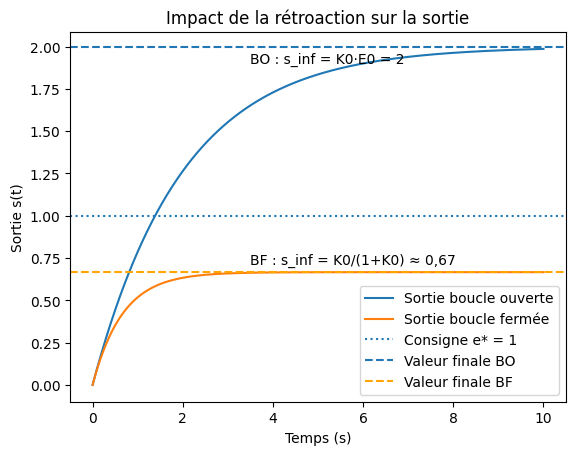
conclusion pour l’écart statique échelon : La rétroaction déplace la valeur finale de la sortie vers la consigne, sans l’atteindre totalement en l’absence d’action intégrale.
Erreur statique – consigne en rampe
- consigne rampe : e*(t) = a·t·u(t)
- Laplace : E*(p) = a/p²
- erreur : eps(t) = e*(t) − s(t)
- BO Laplace : S(p) = H_0(p) · EPS(p)
- avec rétroaction (comparateur +/−) : EPS(p) = E*(p) − S(p)
- relations combinées → après transformation :
- ➝ EPS(p) = E*(p)/(1 + H_0(p))
- th val finale :
eps_inf = lim_{p→0} p·EPS(p) (hyp : BF stable) - quand p → 0 : H_0(p) → K_0
- donc :
EPS(p) ≃ (a/p²)/(1+K_0) - alors :
eps_inf = lim_{p→0} p·(a/p²)/(1+K_0) - ➝ eps_inf → +∞
-
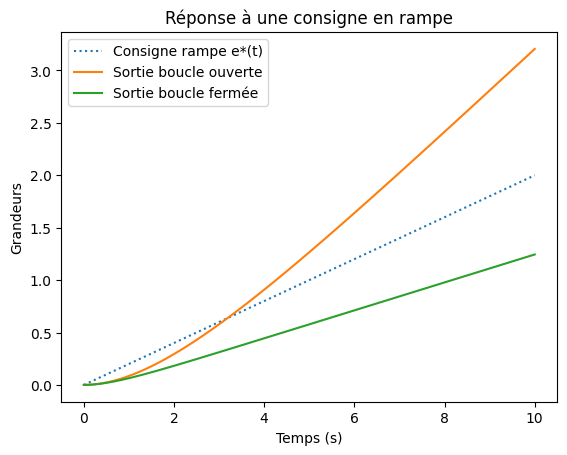
Pour une consigne en rampe, un système du type 0 (sans intégrateur) est incapable d’assurer un suivi correct en régime permanent. Contrairement au cas de l’échelon, l’erreur ne converge pas vers une valeur finie : elle augmente indéfiniment avec le temps.
-
La rétroaction améliore la dynamique, mais ne suffit pas à compenser une consigne variable.La consigne en rampe augmente linéairement avec le temps.
-
En boucle ouverte, la sortie dépend directement du gain du procédé et s’écarte rapidement de la consigne.
-
En boucle fermée, la sortie suit mieux la rampe, mais avec un retard croissant, traduisant une erreur de poursuite non bornée.
-
L’erreur associée confirme qu’un système sans intégrateur ne peut pas suivre durablement une consigne en rampe.
Dans un asservissement de vitesse, la consigne est très souvent une rampe, correspondant à une phase d’accélération contrôlée (faisant partie d’un profile de vitesse en trapèze) . L’analyse en rampe justifie naturellement l’introduction d’une action intégrale afin de limiter l’erreur de poursuite.
conclusion 1er ordre : Après l’échelon, l’étude d’une consigne en rampe met en évidence les limites fondamentales d’un système sans intégrateur.
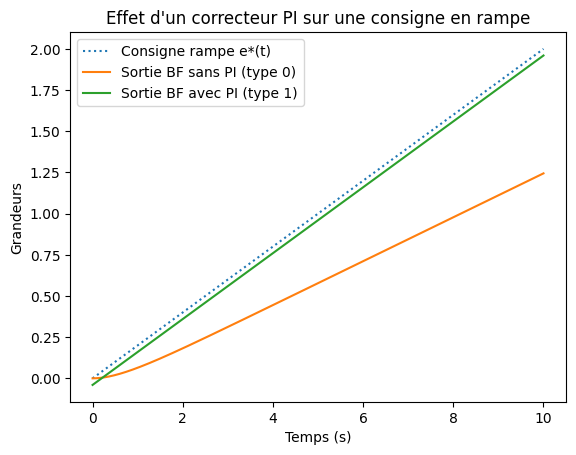
Cas correcteur PI (type 1)
-
correcteur :
C(p) = K_p · (1 + 1/(T_i·p))→ intégrateur -
gain de boucle :
H_0(p)·C(p)→ pôle en 0 ⇒ type 1 -
consigne rampe
e*(t)=a·t:eps_inf = a / K_v(erreur finie) -
➝ PI : annule la divergence, améliore le suivi de vitesse
L’action intégrale permet de transformer une erreur de poursuite divergente en erreur finie pour une consigne en rampe.